
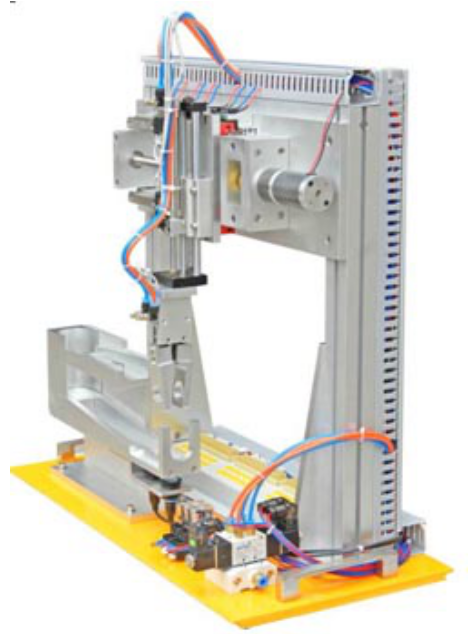
: 产品名称:JGWL-DF型智能物料搬运装置(循环搬运)
硬件保护元件,它们直接串接在电动机的控制电路中,当控制电路失效或元器件损坏时能有效保护电动机和机构的安全。三个位置开关用来检测手臂的位置。
二、产品功能:
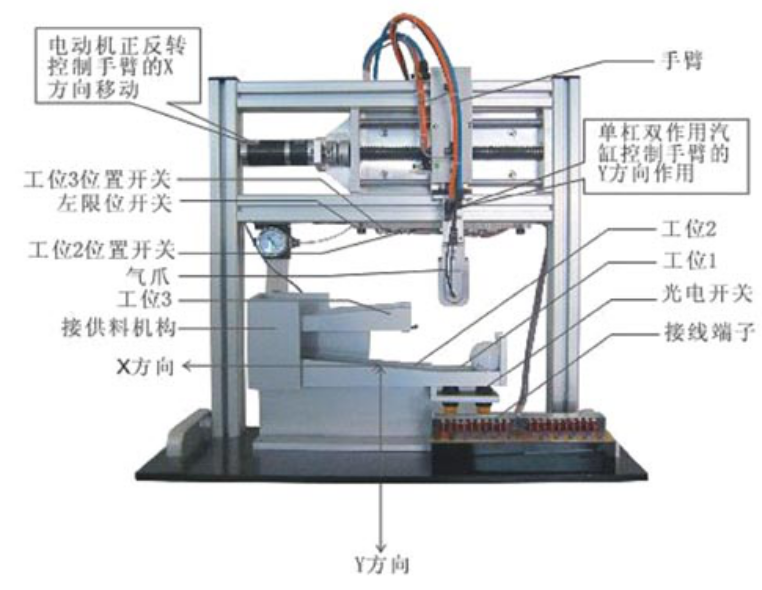
图1 智能物料搬运装置的结构
工位1、工位2是物料位,用来存放待处理的物料。正下方有两个光电开关,用来检测物料是否存在。工位3是放料位,物料从此工位放下。接工料机构可以把工位3上的物料循环到工位1和工位2。
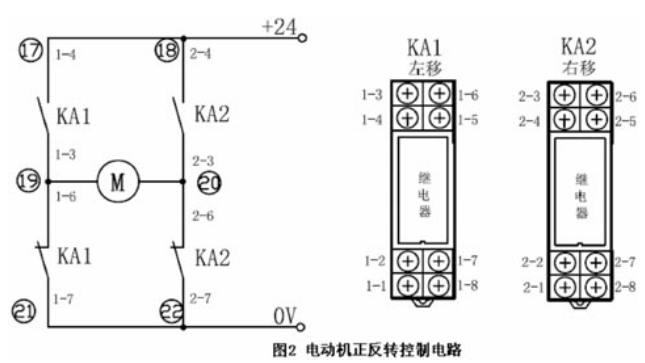
手臂的左右移动是靠电动机的正反转带动丝杆转动工作。电动机正反转控制电路如图2所示。KA1通电KA2断电时,24V电源从19号导线流入电动机从20号导线到电源地,手臂左移;KA2通电KA1断电时,24V电源从20号导线流入电动机从19号导线到电源地,手臂右移。两继电器同时断电或同时通电时电动机不通电不动作。
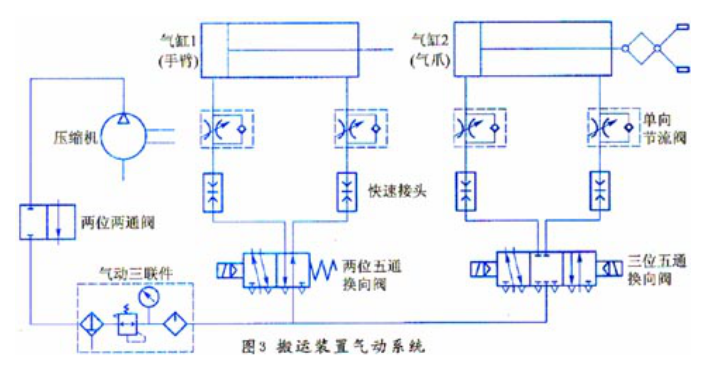
搬运装置在气动系统上只用到两个执行元件,一个为手臂伸缩用双杠双作用汽缸,一个为支点开闭性气动手爪(简称气爪)。气动系统如图3所示。
手臂的上下移动在设计上做了保护,在系统断电的情况下手臂是缩回的,不会突然掉下来对人的财产造成危害;气爪的气路也采用了自锁结构,当系统断电时会保持在断电前的状态。
三、实验内容
让智能物料搬运装置在启动时进行初始化动作,通过1工位上的物料传感器判断该位置是否有小球,有则执行动作抓取小球,并在3工位放下小球,通过各个传感器实现对装置运动轨迹的检测,实现简单的循环搬运功能。
通过光电传感器判断一工位物料有无,通过光纤传感器判断手爪中是否有物体,通过磁性开关判断手爪是否夹紧及是否到达底部,通过行程开关控制手爪的运动轨迹。通过一对电磁阀来控制电机的正反转实现手爪的左右移动,通过电气阀控制手爪的夹紧,放松,下降的动作。
四、实验思考:
(1) 如何实现两个工位的循环搬运。
(2) 如何设置搬运的优先级。
相关产品




