
产品名称:JGBFT1612A 型工业机器人实训工作站多功能实训平台
产品概述
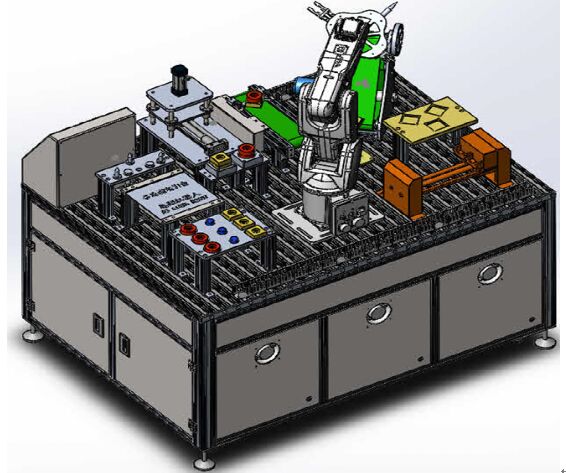
工业机器人实训平台,如图 a 所示,以关节型六轴串联工业机器人为核心,在操作平台的四周合理分布有多种不同工艺应用的实训模块,包含了搬运码垛工艺、分拣工艺、抛光打磨工艺、装配工艺等工业机器人最典型应用,不仅满足了职业院校不同专业学生针对工业机器人的操作和编程的教学需求,完全来源于工业应用现场的特征也使该工作站更加适合于作为职业技能竞赛平台。
工作站深度集成了离线编程技术,软件中不仅包含了与硬件平台的相符三维模型资源,还大大简化了涂胶及搬运码垛工艺实现的编程应用过程、提高轨迹复现精度、避免发生碰撞干涉。
产品 组 成
1. 工业机器人 1 台;
2. 完成产品输送、分拣、码垛,产品轨迹模拟 、 TCP 校点等工作;
3. 组成:机器人模块、实训模块、控制模块等;
4. 平台采用模块化设计,实训功能可自主搭配,能够完成工业机器人认知与操作,运行轨迹操纵,程序数据及设定等示教编程。
• 技术参数
手腕负载
额定 3 kg
最大 5 kg
最大工作半径 720mm
瞬间容许最大转矩 J5 35Nm J6 24Nm
本体重量 30kg
重复定位精度 ± 0.05mm
工作温度 0-40 ℃
• 产品配置及功能
1 设备名称:工业机器人 主要参数 :

型 号 TR607 • 手腕负载 • 额定 3 kg • 最大 5 kg • 最大工作半径 720mm • 自由度 6 轴 • J1 370 ° /s • J2 370 ° /s • 关节速度
• J3 430 ° /s • J4 300 ° /s • J5 460 ° /s • J6 600 ° /s • J1 ± 170 ° • J2 ± 110 ° • 关节范围 • J3 "+40 ° /- 220 ° • J4 ± 185 °
• J5 ± 120 ° • J6 ± 360 ° • 瞬间容许最大转矩 • J5 35Nm • J6 24Nm • 本体重量 30kg • 重复定位精度 ± 0.05mm • 工作温度 0-40 ℃
• 产品介绍
轻量型机器人 , 外形小巧、重量轻,是最适合用于组装小型单元机器人,能够高速、高精度的完成上下料、分拣、装配等各项工作。同时所有机器人线缆内置,能够在狭小的空间灵活的进行作业,安装方式可以选择地面安装、挂装、倒装。 607 特性:手腕额定负载 5Kg, 最大负载波 6Kg, 最大工作半径 720mm 。
产品特点:重量轻、运行速度快、外型美观、重复定位精度高、内置线缆、产品应用物料搬运、更大的灵活性,更稳定的性能、更低的能耗;具有高速性的最大化吞吐量;超长的工作运行时间;节省地面空间;装配高速度、高重复定位精度;节省地面空间;超长的工作运行时间;防护等级高;手腕力矩大
• 轴动作范围
轴 |
动作范围 |
最大速度 |
1 |
回转 +170 °至 ?-170 ° ? |
288 ° /s |
2 |
立臂 + 110 ° 至 - 11 0 ° |
240 ° /s |
3 |
横臂 + 40 ° ? 至 - 220 ° |
300 ° /s |
4 |
腕 + 185 ° ? 至 - 185 ° |
400 ° /s |
5 |
腕摆 + 120 ° ? 至 - 120 ° |
405 ° /s |
6 |
翻转 +360 °至 -360 ° |
600 ° /s |
控制系统
系统主机是采用目前最前沿机器人控制技术,将机器人的伺服驱动控制、机器人控制系统、数据采集及通信、机器人专用硬件接口等进行模块化设计,实现了机器人的控制系统与驱动系统完美应用。
二、电控采用厚板设计理念,结实耐用。其中内含了新开发的硬件急停及 MC 使能单元的控制。
三、外部接口包括了 IO 端子、预留焊接专用端子、三工位操作盒接口、双外部轴接口、连接 X1/X2 的机器人本体插头。
• 示教器
• 便携式示教器 b) 尺寸:彩色 8 寸
c) 全触屏操作,除急停按钮外示教器不携带任何操作按键。
▲ d) 为保障学生操作安全,示教器必需携带钥匙开关、安全开关
|
工作站的实训模块介绍
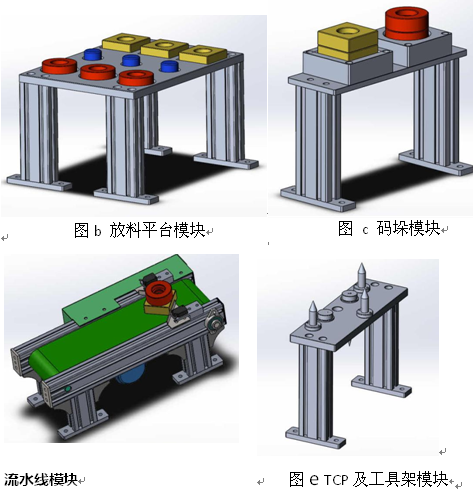
图 b 放料平台模块
放料平台模块
• 搬运应用场景与工厂实际自动上下料相似;
• 可进行机器人点位示教编程与调试;
• 可根据学习内容不同设定不同的搬运方式;
• 可根据工件不同采用不同的搬运夹具。
图 c 码垛模块
码垛模块
• 码垛应用场景与工厂实际纸箱码垛情况相似;
• 可进行机器人点位示教编程与调试;
• 可根据学习内容不同而设置不同码垛形式;
• 可根据工件不同采用不同的夹取夹具。
流水线模块
• 流水线应用场景与工厂实际物流情况相似;
• 可进行机器人点位示教编程与调试;
• 可根据学习内容不同而设置不同挑选形式;
• 可根据工件不同采用不同的夹取夹具。
图 d 流水线模块图 e TCP 及工具架模块
TCP 及工具架模块
• TCP 示教点用于实现机器人基准定位;
• 工具架用于存放机器人各种工具;
• 可根据学习内容不同而选择工具;
• 机器人可根据工件不同选择不同的工具。
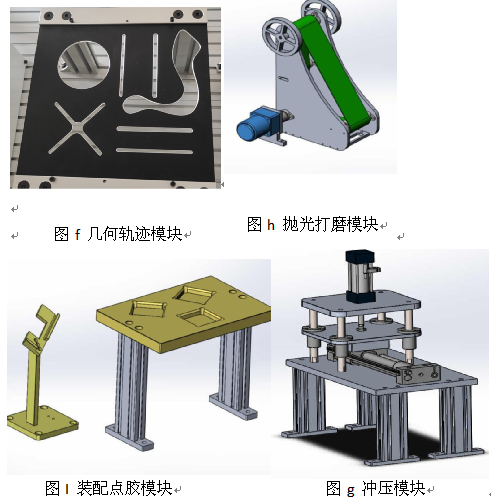
图 f 几何轨迹模块
冲压模块
将工业机器人对产品冲压工艺进行功能抽象化,机器人携带夹治具将产品放入或取出冲压设备中产品,模拟完成冲压自动化生产的轨迹过程,如图 g 所示。保证工艺真实性同时增加教学性和趣味性。
几何轨迹模块
将工业机器人对产品装配前的涂胶工艺进行功能抽象化,机器人携带画笔工具模拟涂胶枪在 3D 轨迹面板上完成固定的轨迹过程,如图 f 所示。保证工艺真实性同时增加教学性和趣味性。
图 g 冲压模块
抛光打磨模块
将工业机器人对产品抛光打磨工艺进行功能抽象化,机器人携带夹治具将产品进行打磨或抛光,模拟完成抛光打磨自动化生产的轨迹过程,如图 h 所示。保证工艺真实性同时增加教学性和趣味性。
图 h 抛光打磨模块
装配点胶模块
将工业机器人对产品装配点胶工艺进行功能抽象化,机器人携带夹治具将产品进行二次定位后实现多个零件组合在一起并点胶,模拟完成装配点胶自动化生产的轨迹过程,如图 I 所示。保证工艺真实性同时增加教学性和趣味性。
将工业机器人对产品加工中心上下料工艺进行功能抽象化,机器人携带夹治具将产品放入或取出加工中心,模拟完成加工中心自动化生产的轨迹过程,如图 J 所示。保证工艺真实性同时增加教学性和趣味性。
图 I 装配点胶模块
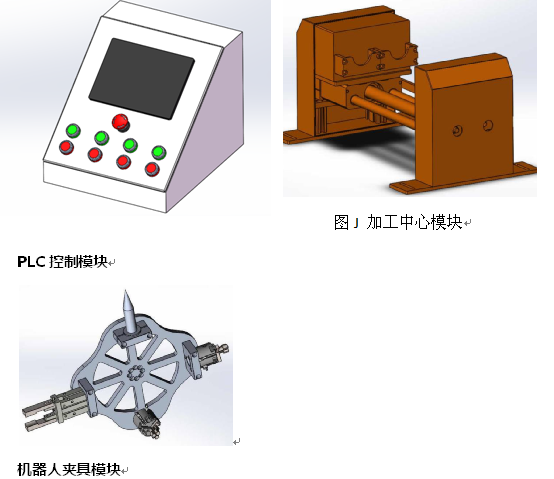
PLC 控制模块
1. 学会控制按钮的接线与定义说明
2. 学会人机交互界面触摸屏的界面编写控制程序设定
3 、学会 PLC 与机器人控制系统、平台工作模块进行电气控制
图 J 加工中心模块
机器人夹具模块
• 采用多工位夹具设计;
• 可根据产品形状实现夹取或吸盘方式;
• 可根据学习内容不同联系不同工具是使用方法;
• 可进行工具的二次开发。
图 K 机器人夹具模块

主要内容:
( 1 ) . 主要实训内容:机器人认知、机器人手动操纵、查看机器人信息、机器人数据的备份与恢复、机器人 I/O 通信、机器人的硬件连接、 PLC 控制、气源装置及气缸、电磁阀控制、机械手手动控制、上料模块的装调与操控、装配模块的装调与操控、机器检测模块的装调与操控、喷涂模块的装调与操控、光电传感器检测及调整、码垛模块的装调与操控、机器人轨迹运动模块装调。
( 2 ) . 此基础平台主要完成以下工作:来料、输送、码垛、分拣、装配、检测等,并搭载了 TCP 校点模块、焊接 ( 涂胶 ) 轨迹模拟模块。
( 3 ) . 此基础工作站以三种工件装配为一款产品为前提,通过来料来料储存 单元 在芯片 组装机构实现物料组装,然后通过 输送装置 输出到 后续工序 。
( 4 ) . 物料储存在码垛模块,由机器人将物料分拣至分拣料盘,分拣好的产品 有机器人再次 送回码垛模块,完成整个循环。
可开展实训项目如下:
( 一)功能描述
本工业机器人多功能工作平台,能够开展(但不仅限于)如下实训项目:
1 、工业机器人的应用;
2 、 PLC 的电气设计和应用;
3 、电机和传感器的技术和应用;
4 、气动技术应用;
5 、变频器的安装与调试;
6 、触摸屏基本控制与设置;
7 、可用于考核或技能竞赛,可考察职业能力;
8 、工业机器人本体与控制器的安装接线。工业机器人初始化与参数恢复;工业机器人码垛应用接线;
9 、工业机器人应用夹具选择与设计工业机器人码垛应用编程与调试;
10 、工业机器人和视觉检测系统数据交换的电气连接与调试技术;
11 、工业机器人外围单元的电气连接与调试技术;
12 、整机系统和监控系统的数据交换电气连接与调试;
13 、工业机器人编程调试和应用;
14 、工业机器人描图操作模块系统的调试;
15 、工业机器人模拟仓库出入库系统的调试;
16 、工业机器人工件装配模块系统的调试;
17 、工业机器人多模块系统的组合与编程应用。
。




